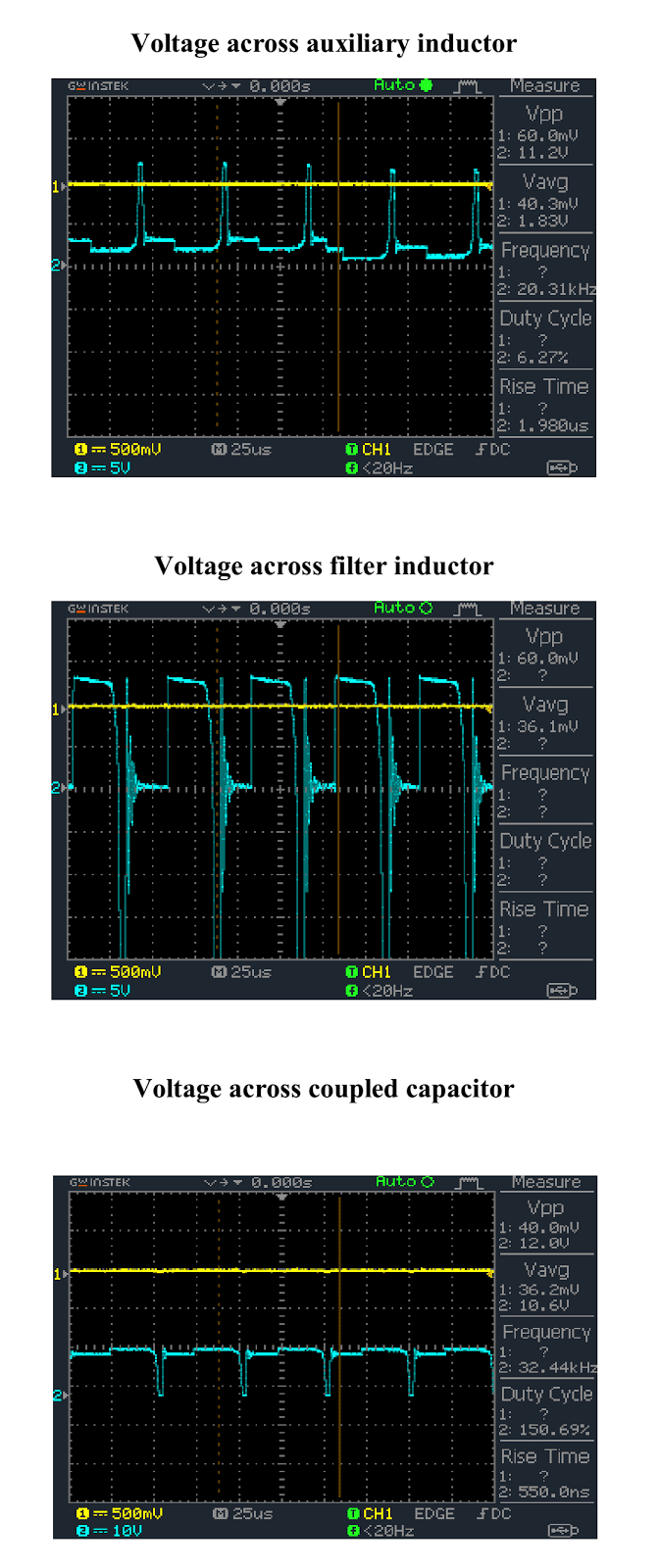
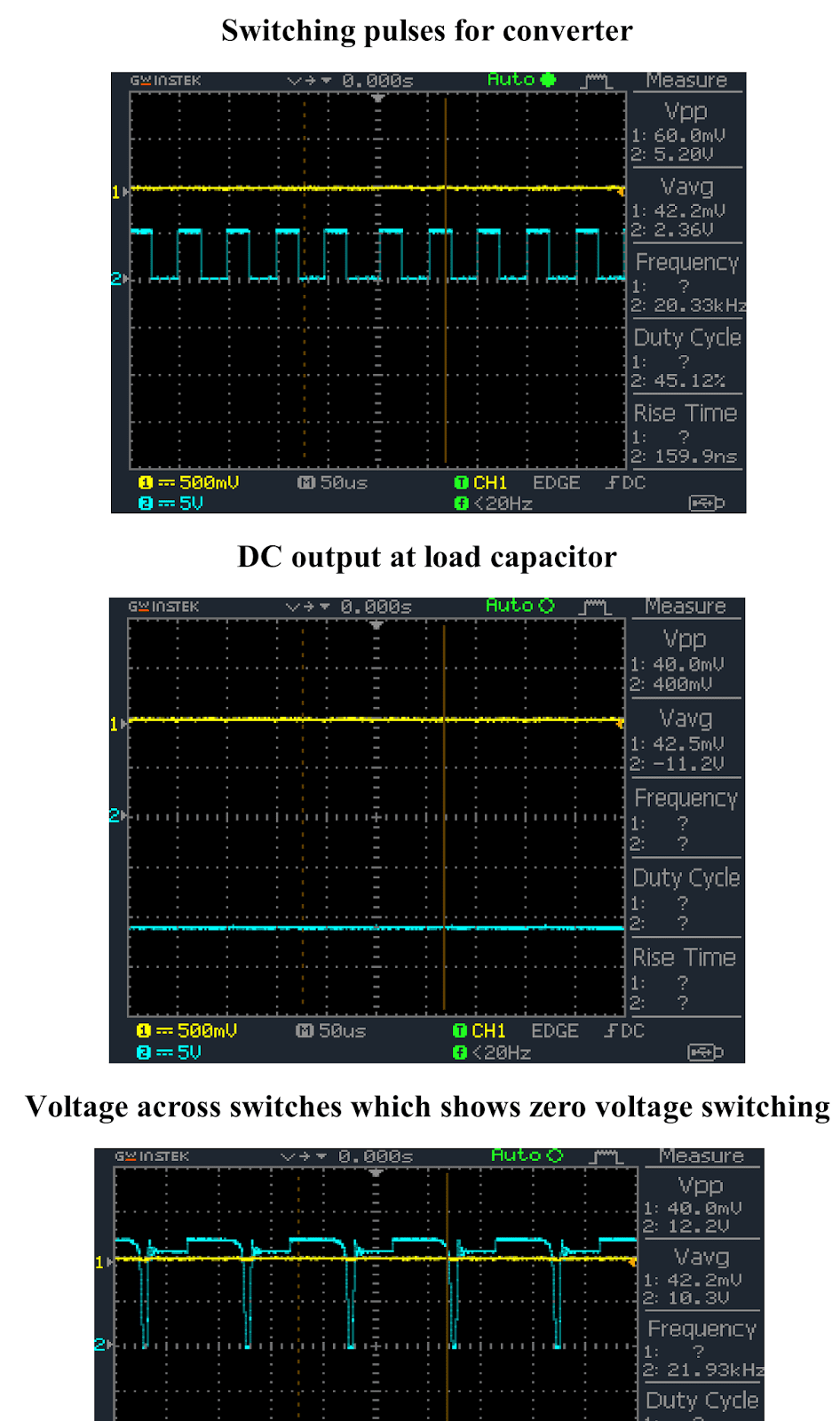
The demand for nonisolated high step-up dc–dc converters in applications such as dc backup energy systems for UPS,photovoltaic and fuel cell systems, and hybrid electric vehicles has been gradually increasing. This paper proposes non isolated step-up dc–dc converters with an improved switching method. The proposed converter shows zero-voltage switching turn-on of the switches in continuous conduction mode as well as reduced turnoff switching losses owing to the switching method that utilizes Lr–Cr resonance in the auxiliary circuit. Also, as a result of the proposed switching method, the switching losses associated with diode reverse recovery become negligible even in the small duty cycle. The capacitance in the auxiliary circuit is significantly reduced compared to the pulsewidth modulation method. The duty cycle loss is further reduced resulting in increased step-up ratio. Experimental results from a 2-kW prototype of a two-phase interleaved version are also provided to validate the proposed concept.
CIRCUIT
BOOST SIDE


PROGRAM
void setup()
{
setPwmFrequency(9, 1);
analogWrite(9,150);
}
void loop()
{
int a=analogRead(3)/4;
analogWrite(9,a);
}
void setPwmFrequency(int pin, int divisor) {
byte mode;
if(pin == 5 || pin == 6 || pin == 9 || pin == 10) {
switch(divisor) {
case 1: mode = 0x01; break;
case 8: mode = 0x02; break;
case 64: mode = 0x03; break;
case 256: mode = 0x04; break;
case 1024: mode = 0x05; break;
default: return;
}
if(pin == 5 || pin == 6) {
TCCR0B = TCCR0B & 0b11111000 | mode;
} else {
TCCR1B = TCCR1B & 0b11111000 | mode;
}
} else if(pin == 3 || pin == 11) {
switch(divisor) {
case 1: mode = 0x01; break;
case 8: mode = 0x02; break;
case 32: mode = 0x03; break;
case 64: mode = 0x04; break;
case 128: mode = 0x05; break;
case 256: mode = 0x06; break;
case 1024: mode = 0x7; break;
default: return;
}
TCCR2B = TCCR2B & 0b11111000 | mode;
}
}
/**
* Divides a given PWM pin frequency by a divisor.
*
* The resulting frequency is equal to the base frequency divided by
* the given divisor:
* - Base frequencies:
* o The base frequency for pins 3, 9, 10, and 11 is 31250 Hz.
* o The base frequency for pins 5 and 6 is 62500 Hz.
* - Divisors:
* o The divisors available on pins 5, 6, 9 and 10 are: 1, 8, 64,
* 256, and 1024.
* o The divisors available on pins 3 and 11 are: 1, 8, 32, 64,
* 128, 256, and 1024.
*
* PWM frequencies are tied together in pairs of pins. If one in a
* pair is changed, the other is also changed to match:
* - Pins 5 and 6 are paired on timer0
* - Pins 9 and 10 are paired on timer1
* - Pins 3 and 11 are paired on timer2
*
* Note that this function will have side effects on anything else
* that uses timers:
* - Changes on pins 3, 5, 6, or 11 may cause the delay() and
* millis() functions to stop working. Other timing-related
* functions may also be affected.
* - Changes on pins 9 or 10 will cause the Servo library to function
* incorrectly.
*
* Thanks to macegr of the Arduino forums for his documentation of the
* PWM frequency divisors. His post can be viewed at:
* http://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1235060559/0#4
*
*/WAVE FORMS